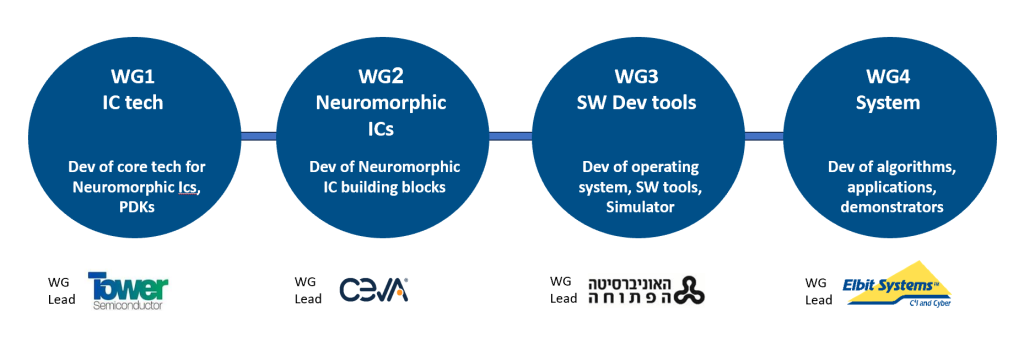
In order to meet its objectives, the NEMO participants are organized into four major work groups, which are responsible for:
Each of the following systems will be developed, tested, and validated using NEMO’s full-stack platform:
From regular camera
From live brain activity
For seismic sensing in security or search/rescue scenarios
Enabling reactive detection of remote objects such as drones based on event cameras